【YASKAWA安川SGM7J-02AFC6S伺服电机用途示例】 |
◆半导体制造设备 | ◆贴片机 |
◆印刷电路板打孔机 | ◆机器人 |
◆搬运机械 | ◆食品加工机械 |
【YASKAWA安川SGM7J-02AFC6S伺服电机编码器、轴端及选购件】 |
编码器规格:24位增量型编码器
轴端:直轴、带键槽、带螺孔
选购件:带油封
【YASKAWA安川SGM7J-02AFC6S伺服电机规格表】 |
额定时间: 连续 | 耐热等级: B | 绝缘电阻:DC500V、10MΩ以上 |
绝缘耐压:AC1500V 1分钟 | 励磁方式:永磁式 | 安装方式:法兰式 |
连接方式:直接连接 | 旋转方向:正转指令下从负载侧观察时,逆时针旋转(CCW) |
振动等级*1:V15 |
环境条件 | 使用环境温度 | 0°C ~ 40°C (40°C ~ 60°C 时,可降低额定值后使用)*4 |
使用环境湿度 | 20%RH ~ 80%RH (不结露) |
安装场所 | •室内无腐蚀性或爆炸性气体的场所 •通风良好,灰尘、垃圾及湿气少的场所 •便于检查和清扫的场所 •海拔 1000m 以下(1000m ~ 2000m 时,可降低额定值后使用) *5 •不会产生强大磁场的场所 |
保管环境 | •在电机不通电的状态下保管时,请遵守下列环境要求。 •保管环境温度:-20°C ~ +60°C (不冻结) •保管环境湿度:20%RH ~ 80%RH (不结露) |
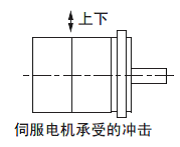
抗冲击强度*2 | 冲击加速度 (以法兰面为标准) | 490m/s2 |
冲击次数 | 2 次 |
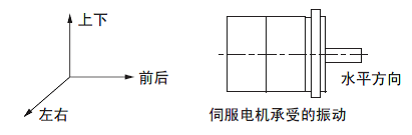
抗振性*3 | 振动加速度 (以法兰面为标准) | 49m/s2 |
组合伺服单元 | SGD7S-1R6A |
SGD7W-1R6A,SGD7W-2R8A |
*1. 振动等级 V15 表示单台伺服电机额定转速时,振动的振幅小于 15undefinedmicro; m。
*2. 水平安装伺服电机轴时,上下方向上的抗冲击强度如上表所示。
*3. 水平安装伺服电机轴时,上下、左右、前后 3 个方向上的抗振性如上表所示。 此外,作用于伺服电机上的振动强度因应用用途而异。因此,请务必通过实际产品确认振动加速度。
*4. 环境温度超过 40°C 时,请参照 "在环境温度超过 40°C 的情况下使用伺服电机时"。
*5. 海拔超过 1000m 时,请参照 "在海拔超过 1000m 的情况下使用伺服电机时"。
*6. 配套Σ-7W伺服单元时,与配套Σ-7S相比,可能出现无法调高增益,性能降低等情况"。
【YASKAWA安川SGM7J-02AFC6S伺服电机额定值】 |
电压 | 200V |
型号 SGM7J- | 02A |
额定输出*1 | W | 200 |
额定转矩*1,*2 | N·m | 0.637 |
瞬时最大转矩*1 | N·m | 2.23 |
额定电流*1 | Arms | 1.6 |
瞬时最大电流*1 | Arms | 5.8 |
额定转速*1 | min-1 | 3000 |
最高转速*1 | min-1 | 6000 |
转矩参数 | N·m/Arms | 0.444 |
转子转动惯量 | ×10-4kg·m2 | 0.263 |
(0.333) |
额定功率变化率*1 | kW/s | 15.4 |
(12.1) |
额定角加速度*1 | rad/s2 | 24200 |
(19100) |
带油封的额定值降低率 | % | 90 |
散热片尺寸 | mm | 250 × 250 × 6 |
保护结构*3 | 全封闭自冷 IP67 |
保持制动器规格*4 | 额定电压 | V | DC24V ± 10% |
容量 | W | 6 |
保持转矩 | N·m | 0.637 |
线圈电阻 | Ω (at 20°C) | 96 ± 10% |
额定电流 | A (at 20°C) | 0.25 |
制动器打开时间 | ms | 60 |
制动器动作时间 | ms | 100 |
容许负载转动惯量 (转子转动惯量的倍率) | 15倍 |
外置再生、带 DB 电阻时 | 35倍 |
|
|
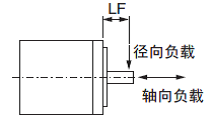
轴的容许负载*5 | LF | mm | 25 |
容许径向负载 | N | 245 |
容许轴向负载 | N | 74 |
(注)()内为带保持制动器的伺服电机的值。
*1. 与伺服单元组合并运行后,电枢线圈温度为 100°C 时的值。其它项目为 20°C 时的值。各值均为标准值。
*2. 额定转矩表示安装在表中所示尺寸的铝制散热片上且环境温度为 40°C 时的连续容许转矩值。
*3. 轴贯通部分除外。仅使用专用电缆时,满足保护结构规格。
*4. 使用带保持制动器的伺服电机时,请注意以下几点。
• 无法将保持制动器用于制动。
• 保持制动器打开时间和动作时间因放电回路而异。使用时,请务必通过实际产品确认动作延迟时间。
• DC24V 电源请用户自备。
*5. 轴的容许负载如下所示。在机械设计时,应防止在伺服电机运行中承受的径向负载和轴向负载超出表中的值。